



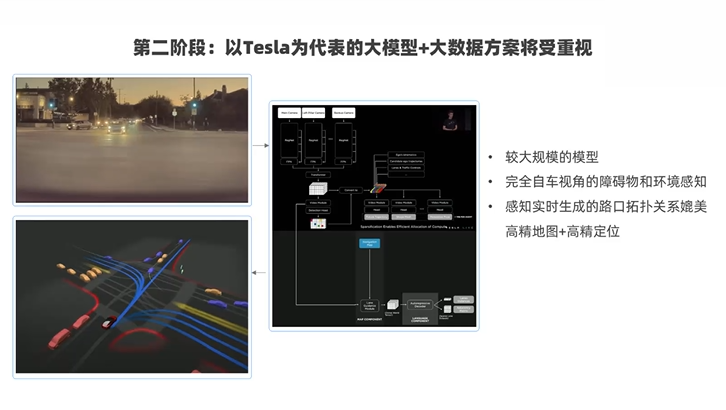
回到觉非科技的维度,我们对主机厂而言,用一句话告诉所有客户、主机厂,我们的价值就是,我们是来帮你实现特斯拉数据闭环的角色和供应商。如果你想实现特斯拉的数据闭环,我们可以提供一套参考算法给你,可以帮你实现数据训练你的软件算法,让你的软件算法不断地升级,不断地“重感知、轻地图”,从一个城市进入到另外一个城市,进入更多的城市,从而建立起乘用车销售的竞争力。这是从行业目前对标来看非常明显的,就是基于特斯拉的模式来进行。


-
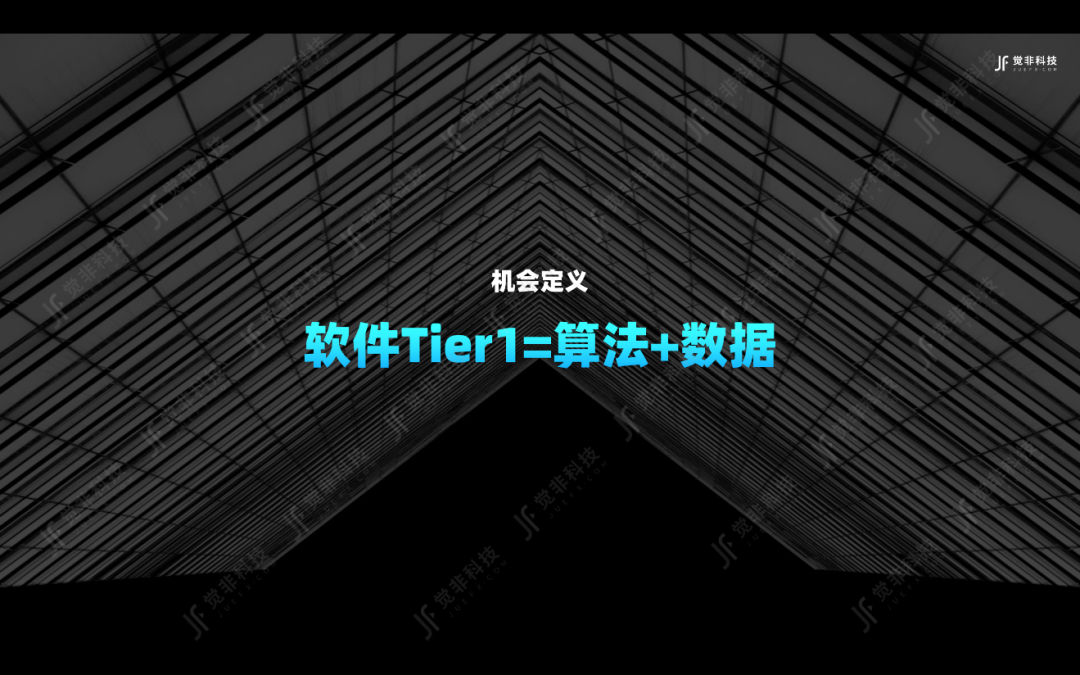
数据壁垒,是我们向主机厂提供数据及数据处理的服务和能力。
-
工程化经验,我们将训练好的软件算法,无论是小模型还是大模型,就像前面分享的基于多传感器融合的,无论是感知、定位、预测还是记忆建图等等,提供给主机厂,让他们安装在车辆上。我们通过收取开发费和授权费的方式,获取商业利润。 -
算法与数据之间的联动和飞轮效应,作为一个软件Tier1的竞争壁垒的闭环。我们获得了大量实际运行的数据后,不能把这些数据在客户之间来回倒卖,这是违反商业道德的。我们可以做的是用这些数据去训练算法,然后把这些算法作为成果去落地实践。这样就构成了我们自己的算法和数据之间形成的软件闭环。




Q&A
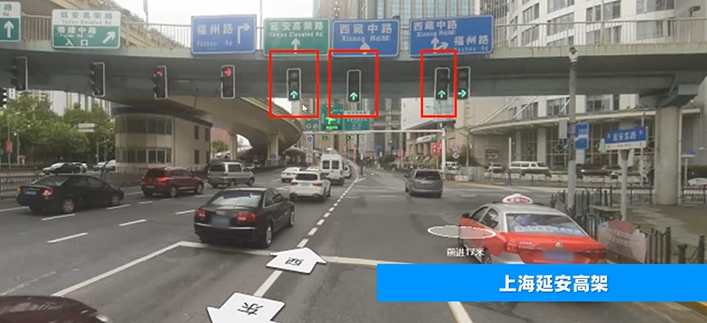
李东旻:首先,我们要明确一点,无图的全称是无高精地图,并不是没有地图。目前全行业,包括特斯拉在内,都是有地图的,所以我们更愿意用轻图的方案,叫Lite Map,避免一些歧义。这是其一。
席友:如何看待World Model在自动驾驶的前景?
李东旻:这个问题很前沿,World Model这种生成式数据能不能够去取代数据采集的维度?我想从这个维度来理解,基于世界的模型,它对于数据采集,或者对于大模型、自动驾驶的帮助会有多大?
李东旻:我理解长尾效应其实是在谈Corner case,我觉得把它分成两个维度或者分成两个场景。

嘉程资本Next Capital是一家专注科技领域的早期投资基金,作为创新者的第一笔钱,我们极度信仰科技驱动的行业创新,与极具潜力的未来科技领袖共同开启未来。
我们的投资涵盖人工智能、硬科技、数字医疗与健康、科技全球化、生物科技与生命科学、企业服务、云原生、专精特新、机器人等领域。投资案例包括元气森林、熊猫速汇、寻找独角兽、店匠、士泽生物、芯宿科技、未名拾光、橄榄枝健康、硅基仿生等多家创新公司。
嘉程资本旗下的创投服务平台包括「嘉程创业流水席」,「NEXT创新营」、「未来联盟」等产品线,面向不同定位的华人科技创新者,构建了大中华区及北美、欧洲和新加坡等国家地区活跃的华人科技创新生态,超过3000位科技行业企业家与巨头公司高管在嘉程的平台上分享真知灼见和最新趋势。
嘉程资本投资团队来自知名基金和科技领域巨头,在早期投资阶段富有经验,曾主导投资过乐信(NASDAQ:LX)、老虎证券(NASDAQ:TIGR)、团车(NASDAQ:TC)、美柚、牛股王、易快报、PingCAP、彩贝壳、云丁智能等创新公司的天使轮,并创办过国内知名创投服务平台小饭桌。
嘉程资本
握手未来商业领袖
BP 请发送至 BP@jiachengcap.com
微信ID:NextCap2017